1.3 采埃孚ZF同轴减速器原理介绍
ZF 同轴减速器进展
采埃孚ZF 的同轴减速器不同于舍弗勒的NW方案,而是比较巧妙的差减一体方案,即没有专门的差速器机构,而是融入了行星轮系之中。
根据新闻,该款ZF减速器已经于2025年在国内量产。以下是2025年12月的新闻。
“全球首台基于行星齿轮技术方案的Indi同轴减速器产品,近日在采埃孚杭州工厂正式下线并实现批量交付。这一创新产品将搭载于中国头部汽车制造商的主流中高端电动车型(实际是搭载吉利极氪汽车),该车型首批车辆即将投放市场。此次批量交付不仅标志着采埃孚在电驱动核心部件领域的重要突破,同时也以“德国技术概念+中国自主研发”的创新模式,为采埃孚深化全球电动化战略、巩固亚太市场领先地位注入核心动能。”

新闻稿里提到的主要优点
1) 空间效率提升:相比传统减速器,体积缩减约50%,为电动车底盘布局释放更多设计自由度;
2) 重量减轻:重量降低50%,助力整车续航能力提升;
3) 传动效率优化:通过减少能量损耗,显著提升车辆动力性能与能效表现。
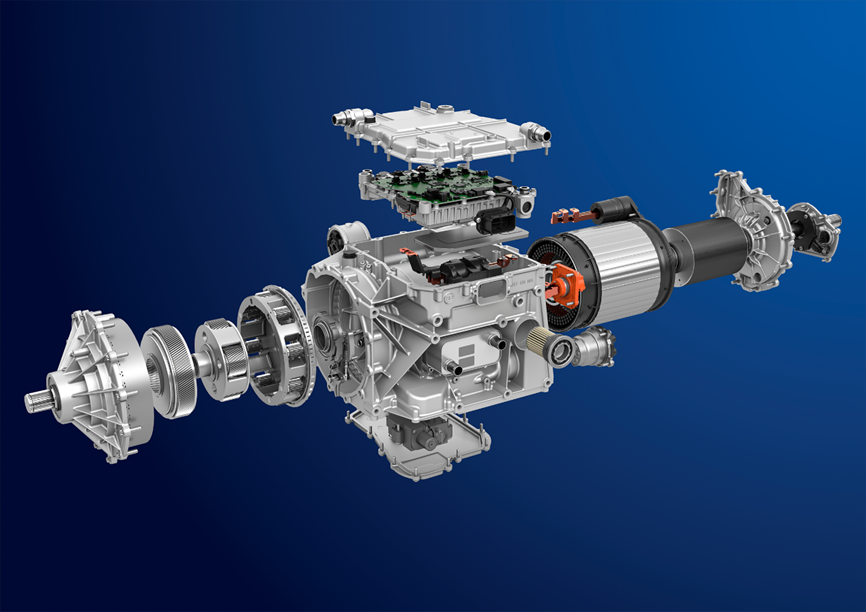
集成Indi减速器的三合一电驱动系统爆炸图:
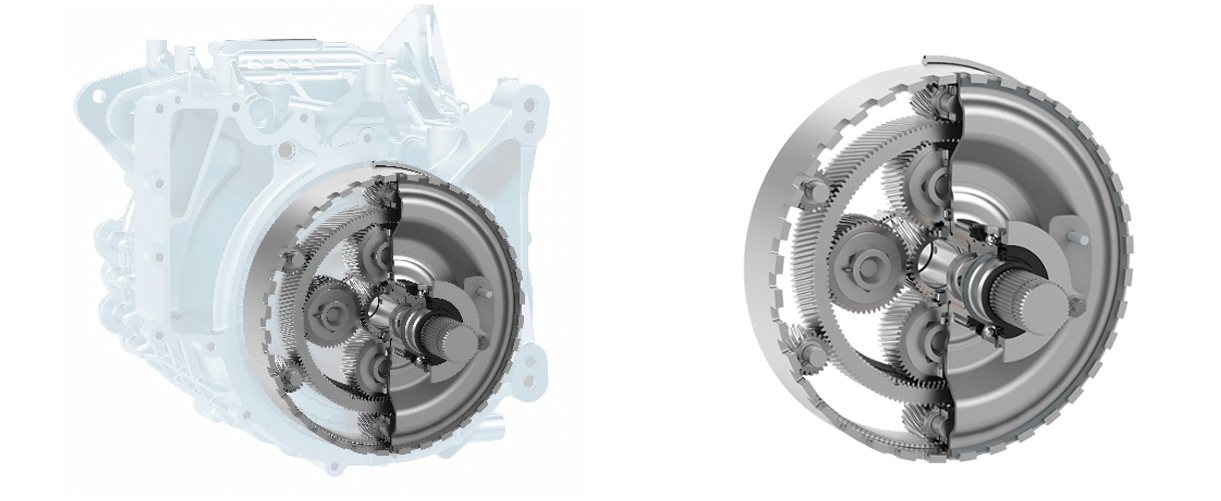
ZF Indi 减速器的原理
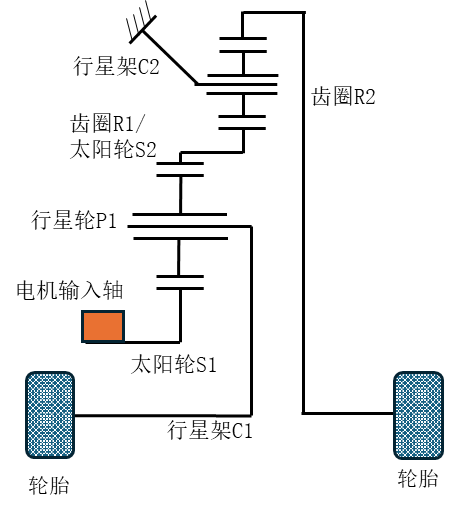
ZF Indi同轴减速器实际上是两级的NGW行星排串联而成,一级的齿圈作为二级的太阳轮,固定二级的行星架,分别使用一级的行星架和二级的齿圈输出。这种结构原理看似简单,实际一点也不容易,要对行星轮减速器有深入的理解才能玩的转。
速比计算行星齿轮基本运动关系式
对于简单行星齿轮机构(Simple Planetary Gear Train),其基本运动关系为:

其中:
ns :太阳轮转速
nR :内齿圈转速
nPC :行星架(载体)转速
α :齿数比参数,定义为

该公式描述了在行星齿轮机构中,太阳轮、内齿圈与行星架三者之间的转速约束关系。
公式的物理意义
该公式可改写为:

从中可以看出:
1) 行星架转速是太阳轮转速与齿圈转速的齿数加权平均。
2) 当 α 较大(齿圈齿数远大于太阳轮)时,行星架转速更接近齿圈转速
3) 当 α 较小时,行星架转速更接近太阳轮转速
ZF Indi 两级减速计算
采埃孚这款减速器简单来看,是两级NGW简单行星排的串联,因此可以使用两个NGW行星排的速比计算公式联立进行计算。