1.2 舍弗勒同轴减速器(NW构型)介绍
舍弗勒的同轴减速器是行星减速器+ 行星差速器两部分组成。
舍弗勒早在2019年为奥迪e-Tron车型开发和量产了该款同轴减速器,如图所示。
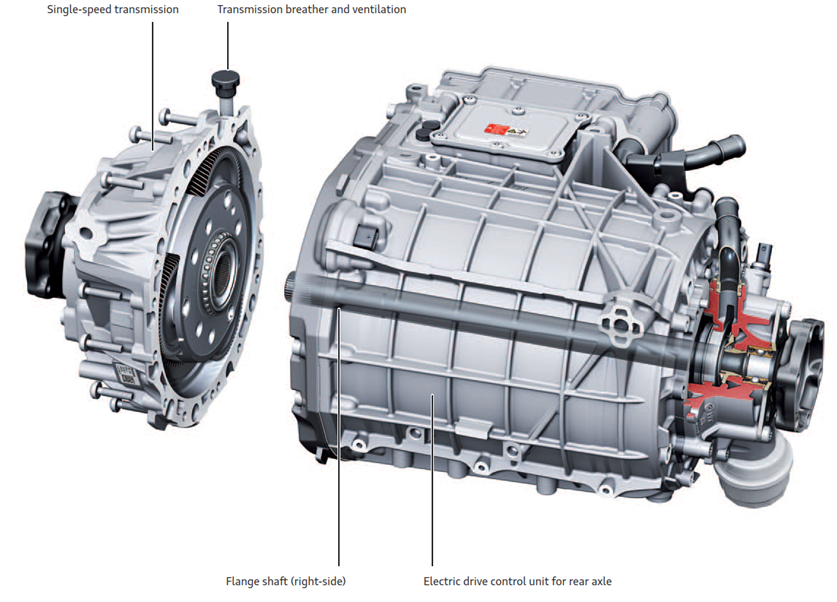
该款同轴减速器的结构原理
Ø 从电机输入轴动力输入,与减速器太阳轮连接。
Ø 经太阳轮 – 双联行星轮 – 内齿圈 -行星架,最后通过行星架输出。
Ø 行星架又作为输入,将动力输入给内部的直齿行星齿轮差速器,最后经过差速器的左右太阳轮输出给半轴和车轮。
减速器的速比计算
参考国标 GB/T 33923-2017 行星齿轮传动设计方法中第12页的计算公式:
舍弗勒该款减速器的主要参数(数据来自网络):
|
参数 |
奥迪该款电驱系统性能 |
|||
|
电机类型 |
异步电机(ASM) |
|||
|
冷却方式 |
水冷 |
|||
|
电压等级 |
360V |
|||
|
峰值扭矩 |
355Nm 10s |
|||
|
峰值功率 |
165Kw 10s |
|||
|
持续功率 |
95Kw at 7000rpm 30min |
|||
|
持续扭矩 |
130Nm(持续功率点) |
|||
|
减速器主要参数 |
||||
|
参数 |
太阳轮 |
行星轮1 |
行星轮2 |
齿圈 |
|
齿轮旋向 |
R |
L |
L |
R |
|
齿数 |
42 |
81 |
27 |
113 |
|
速比 |
9.07 |
|||
|
齿轮模数 |
1.06 |
1.66 |
||
|
压力角 |
16 |
23 |
||
|
螺旋角 |
28 |
15 |
||
|
中心距 |
74 |
|||
|
齿宽 |
17 |
14.5 |
23 |
26 |
|
齿顶圆 |
51.92 |
98.74 |
49.32 |
131.81 |
主要优点
1) 原理简单,结构比较成熟。
2) 相比平行轴减速器来说,体积小,重量轻。4500Nm级别减速器重量约21kg。平行轴大约30kg左右,减重明显。
3) 所需润滑油量少。结构紧凑,内部体积小,所需润滑油量比平行轴少很多。
4) 效率会比平行轴略高。主要是油量少,搅油损失低;另外减速器内轴承损失小,主要是球轴承和滚针轴承,且基本没有轴向力。而平行轴差速器是锥轴承,轴向力大,损耗相对高。
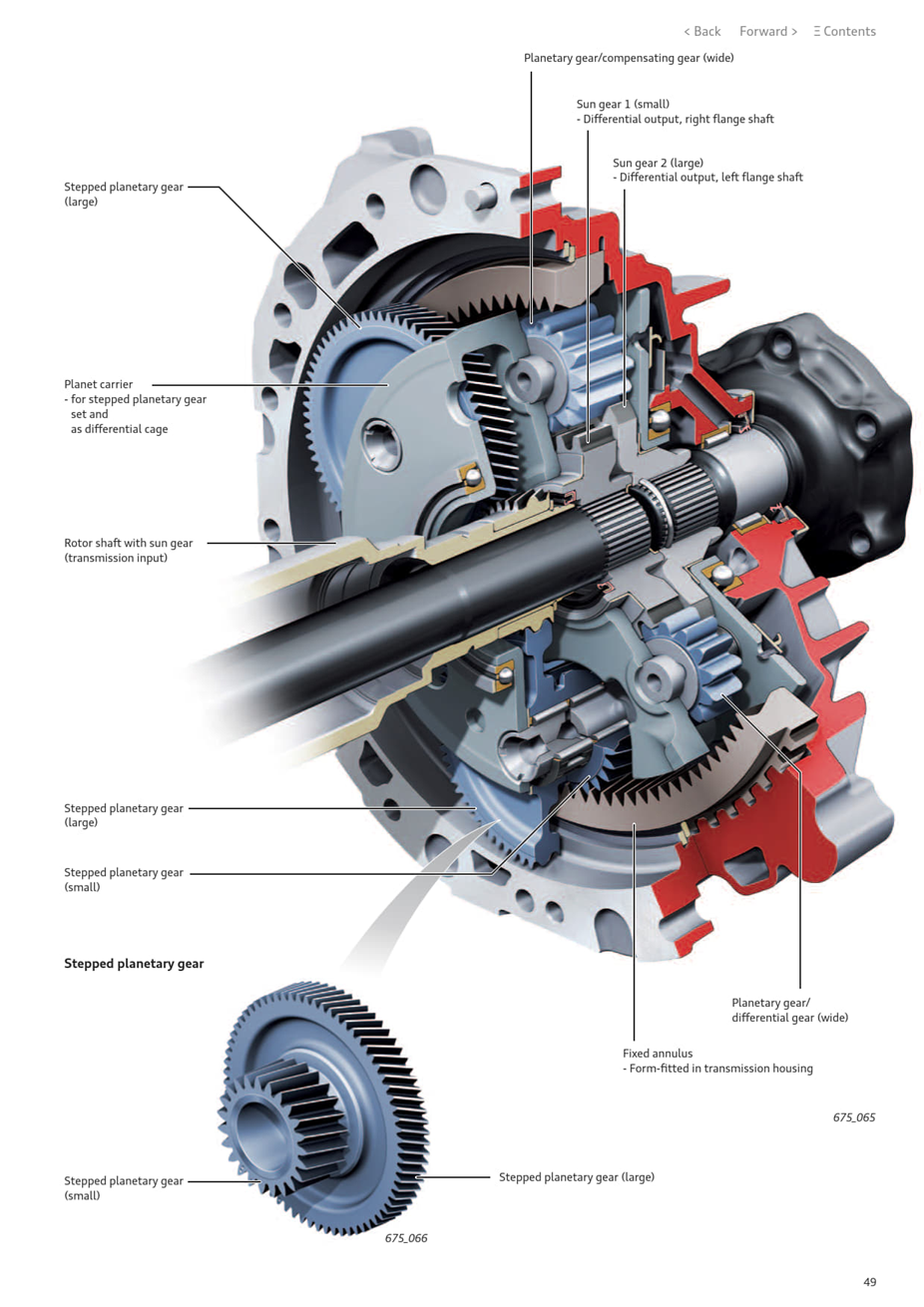
舍弗勒直齿行星差速器原理
舍弗勒直齿行星差速器的结构图如下所示。在Audi e-tron车型上首次量产应用。相比传统伞齿差速器主要优点:
1) 结构紧凑,可传递的扭矩比高
2) 相比传统铸造伞齿差速器,可减轻部分重量。
3) 相比传统伞齿差速器,左右半轴齿轮没有轴向力,仅传递扭矩。对支撑件的结构强度要求低很多。
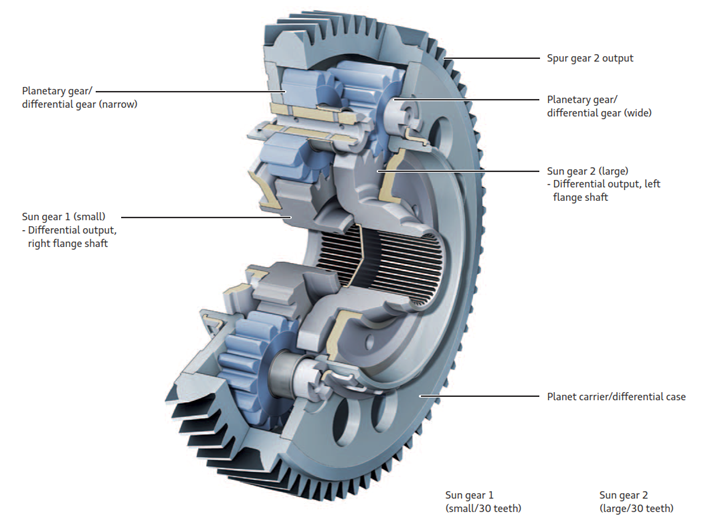
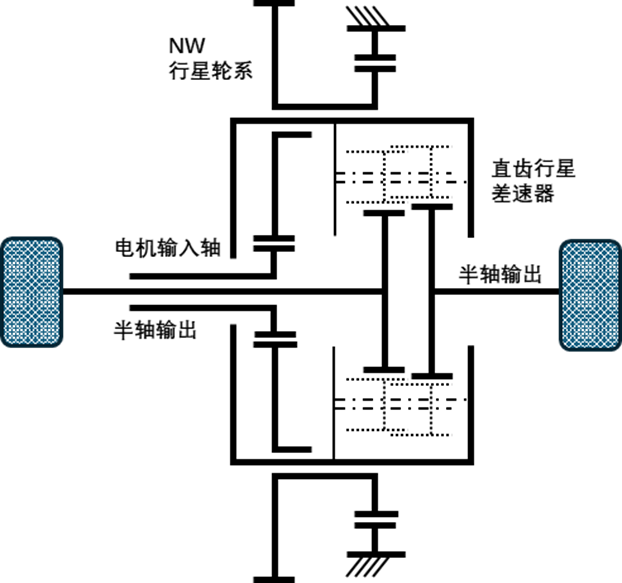
直齿行星减速器的动力传递路径:
扭矩从行星架传递进来 => 行星销 => 宽行星轮/窄行星轮 => 左 / 右 半轴太阳轮。
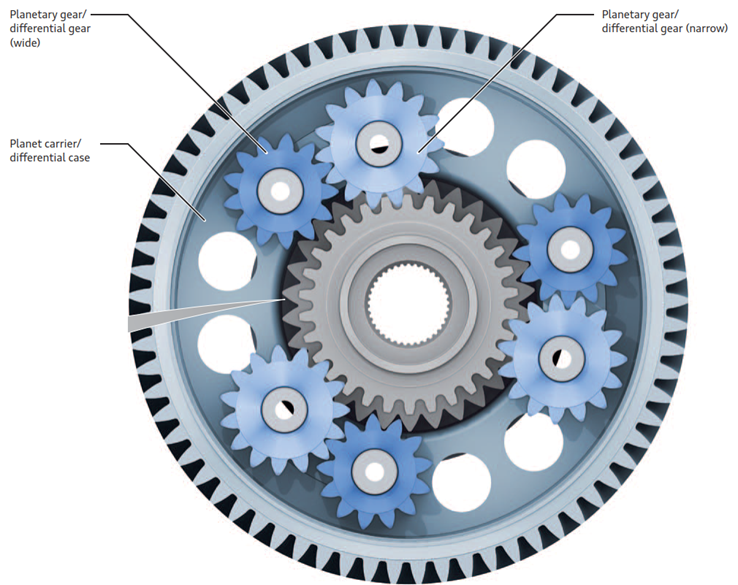
宽行星轮/窄行星轮 和 左 / 右 半轴太阳轮的配合关系如下图所示,
当左右半轴齿轮有转速差时,会宽/窄行星轮会相应自转。啮合过程为:大太阳轮 => 宽行星轮 => 窄行星轮 => 小太阳轮。宽/窄行星轮 类似于伞齿差速器内的行星齿轮一样,用来协调左右半轴齿轮的转速差。
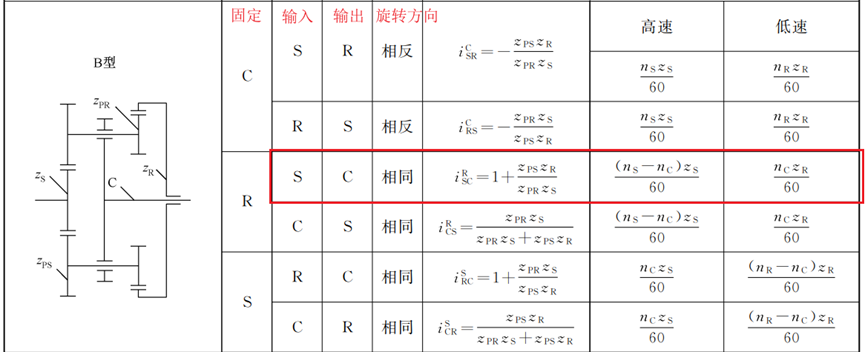
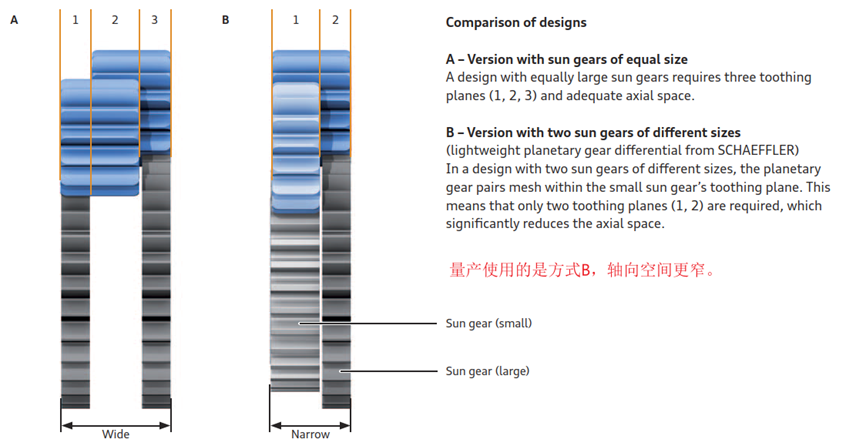
直齿差速器的配置有两种方案,如下图A 和 B所示。B方案的优点是能够让轴向空间更短,更紧凑。B方案据称是舍弗勒公司的专利。
该款直齿差速器的设计要点:
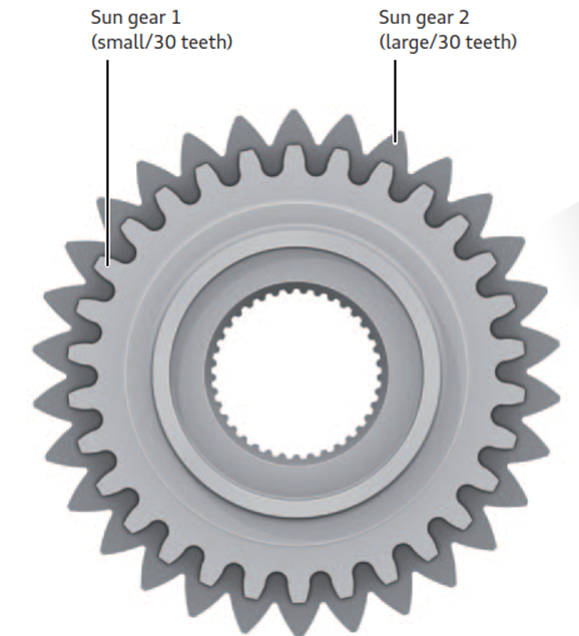
1)左右半轴能够实现转速相等的必要条件是:左右半轴齿轮的齿数相等。舍弗勒这个应用里左右半轴齿轮齿数是30。
2)行星齿轮和半轴齿轮是互相啮合的,这几组齿轮的模数肯定是一样的。
使用杠杆原理来分析该减速器的转速相等,扭矩等分原理,差速器示意图和杠杆图如图所示。
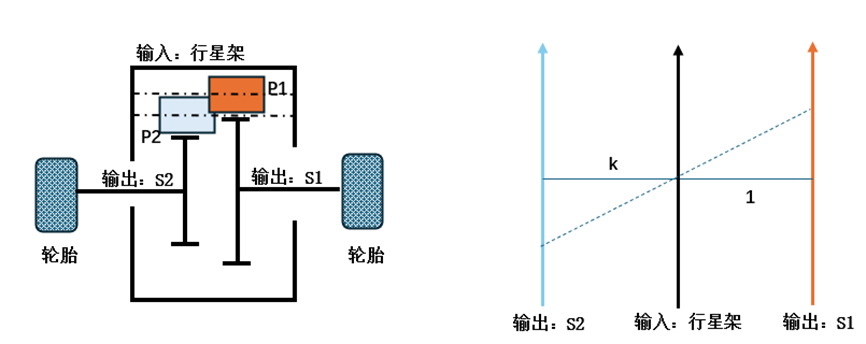
左右半轴齿轮转速相等
当行星架固定时,行星轮系变成定轴传动。那么左车轮到右车轮的传动比为:

所以左右半轴齿轮的齿数必须相等,才能保证左右半轴转速相等。
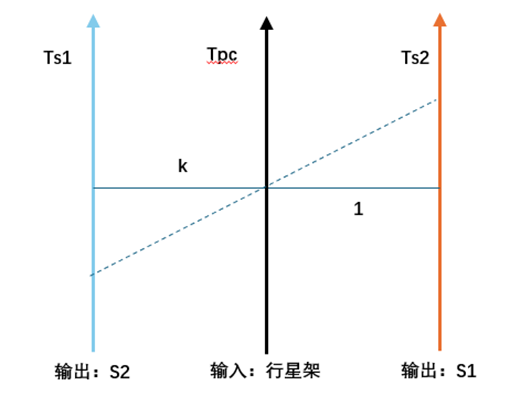
左右半轴齿轮扭矩均分
同样使用该方式来理解差速器的扭矩等分。分别对S1和S2取矩。

K=1,所以最后会得到 Ts1 = Ts2 = 1/2 * Tpc
两半轴转速相等,扭矩等分,满足了该机构可以作为差速器使用的充分条件,而必要条件即为两半轴(太阳轮)同时和行星轮啮合,允许转速不同时其转速差由行星轮自转来补偿。
当然,同轴减速器内并不一定要使用该款直齿行星差速器,匹配传统伞齿方案的差速器一样也是可以的。
至此,舍弗勒同轴减速器和行星差速器的原理就介绍完了。
没有要显示的评论
没有要显示的评论